
.
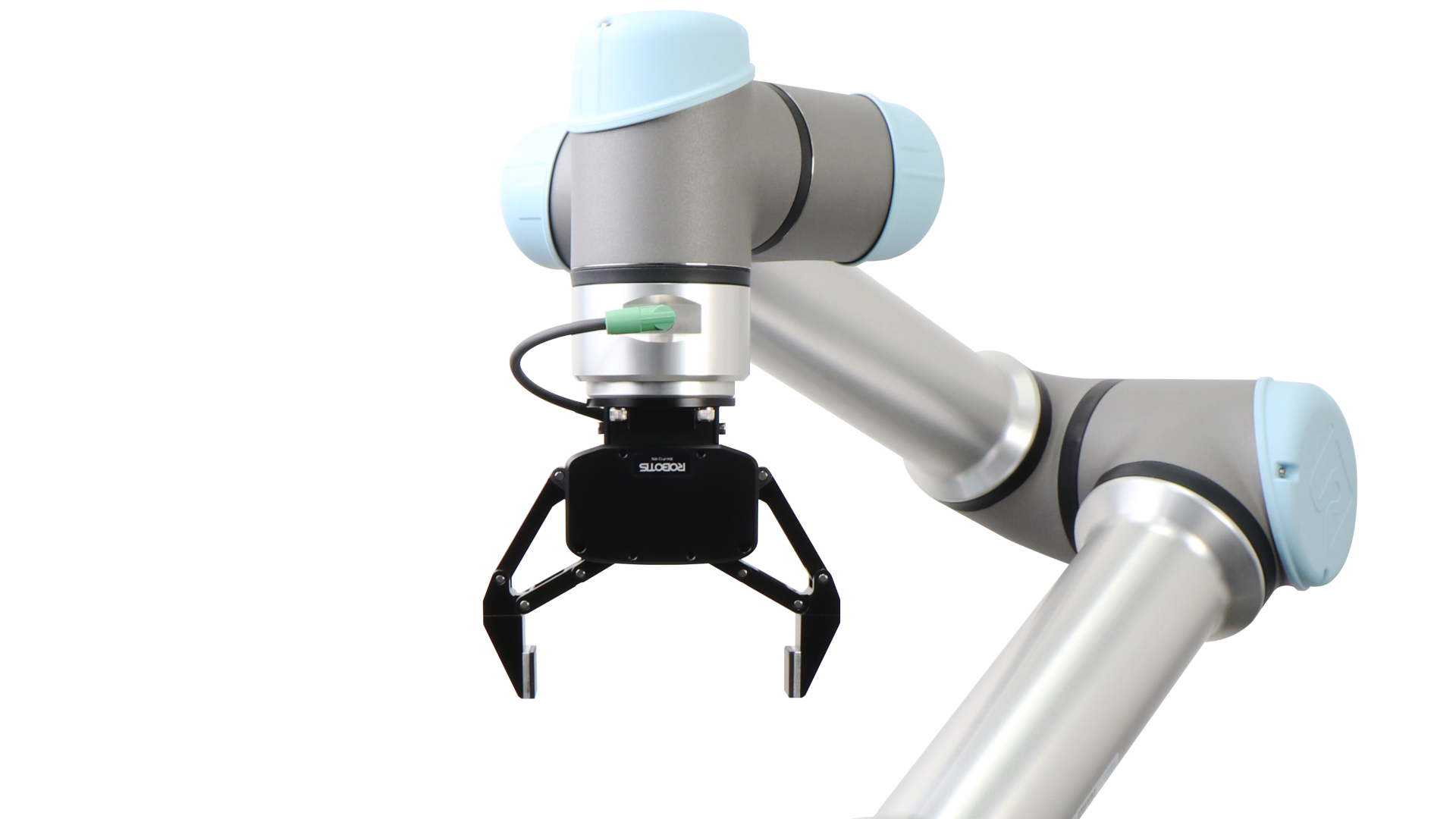
RH-P12-RN-UR
Description
Features
ROBOTIS Robot Hand for Universal Robots e-Series
1-DOF Two-Finger Hand
Multi-functional robot hand with 2 fingers powered by 10W DC motor.
Adaptive Gripping Design
Passive Joints enable adaptive gripping for various shapes of objects.
Current Control (Force Control)
Torque control and current-based position control make it possible to pick up objects of various materials.
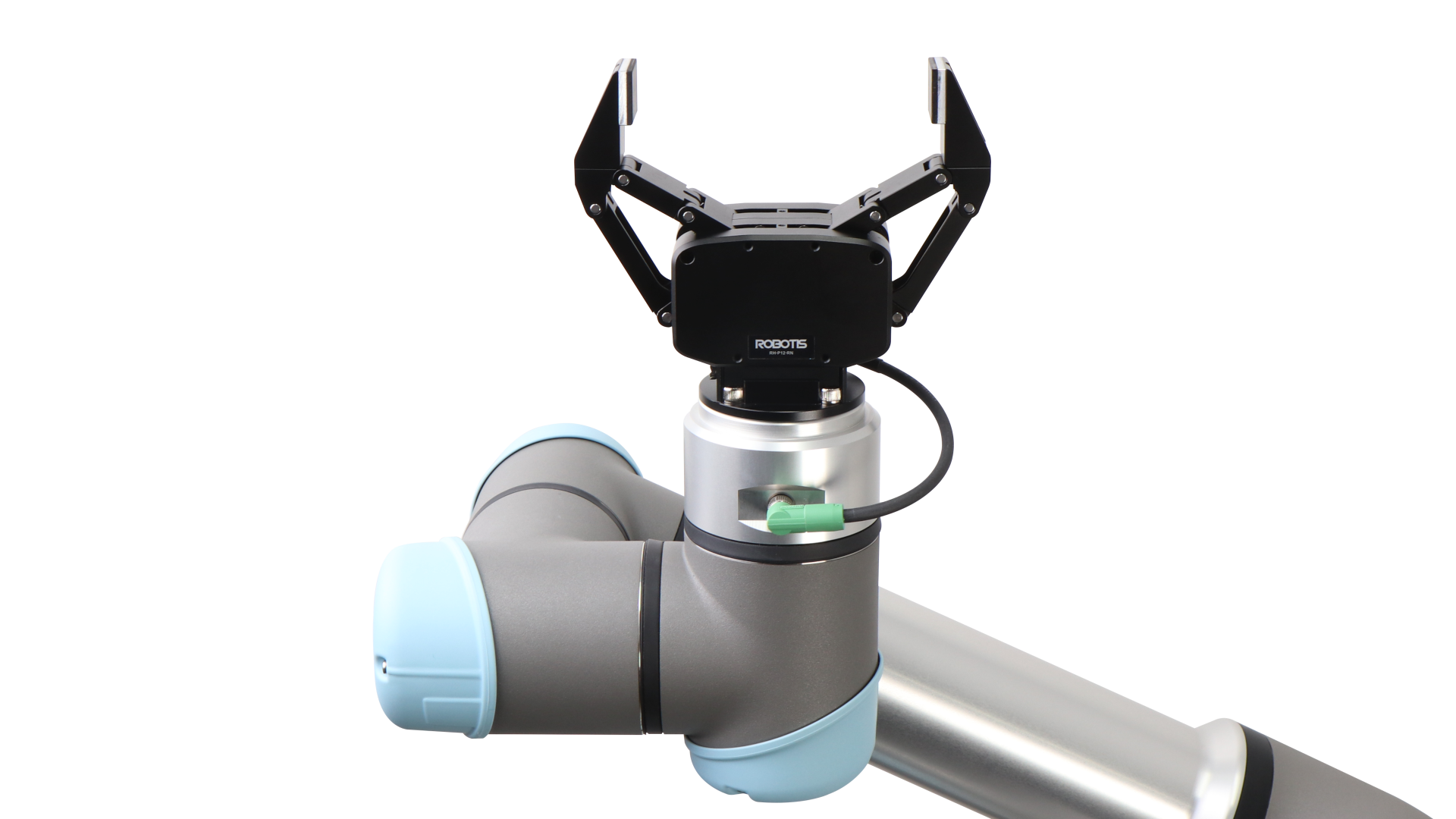
Light Weight & High Power
5kg of high payload is delivered from 500g light weighted robot hand.
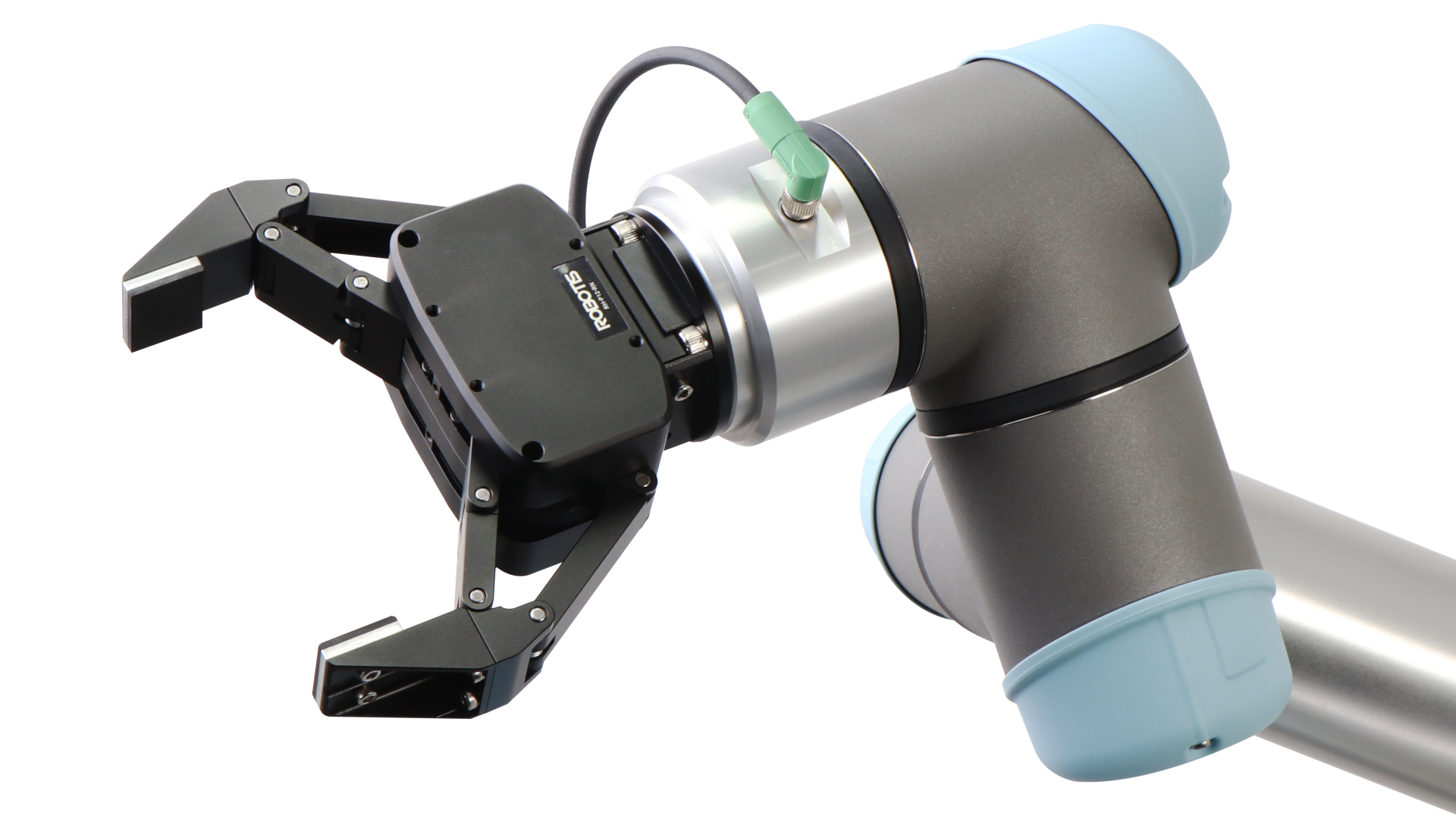
Detachable Finger Tips
Detachable finger tips can be easily replaced with customized finger tips.
Intuitive and Simple Mounting
The robot band can be quickly mounted on ROBOTIS Manipulator.
Simplified design enables easy mounting on custom applications.
Package Components
Package including RH-P12-RN & Universal Robots e-Series exclusive parts
|
RH-P12-RN |
1 (Assembled Product) |
|---|---|
| UR Mounting Frame | 1 |
| Cable Cover Frame | 1 |
| Robot Cable 180mm (URe Exclusive) | 1 |
| WB M3x4 | 4 |
| WB M6x8 | 6 |
| WB M3x8 | 6 |
| Hex Key (Wrench) | 2 Types |
| USB Memory (For mounting UR Cap) | 1 |
| QuickStart | 1 |

Compatible Products
UR3e
UR5e
UR10e
UR16e
H/W Specification
| MCU | ST CORTEX-M4 (STM32F405 @ 168Mhz, 32bit) |
|---|---|
| Position Sensor | Contactless Absolute Encoder (12bit, 360°) |
| Motor | Coreless |
| Baud Rate | 9,600 bps ~ 10.5Mbps |
| Control Algorythm | PID Control |
| Degree of Precision | 0.088° |
| Operating Mode | Current Control Mode Current based Position Control Mode |
| Weight | 500g |
| Stroke | 0-106mm |
| Gear Ratio | 1181 : 1 |
| Maximum Gripping Force | 170N |
| Recommended Payload | 5kg |
| Operating Temperature | -5°C ~ 55°C |
| Nominal Voltage | 24V |
| Command Signal | Digital Packet |
| Protocol Type | RS485 Asynchronous Serial Communication (8bit, 1stop, No Parity) |
| Physical Connection | RS485 Multidrop BUS |
| ID | 0 ~ 252 |
| Feedback | Position, Velocity, Current, Temperature, Input Voltage, etc |
| Material | Full Metal Gear, Metal Body |
| Standby Current | 30mA |
Factory Default Settings
| ID | 1 |
|---|---|
| Baud Rate | 57600bps |
Please make necessary modifications to ID, baud rate, etc. after purchase
Caution
The shape has been changed to increase the durability of the fingertip, which has resulted in a stroke change of 109mm to 106mm.
(Applies to orders shipped out from November 4, 2019)
Links