.


ROS Support for Convenient Research and Education
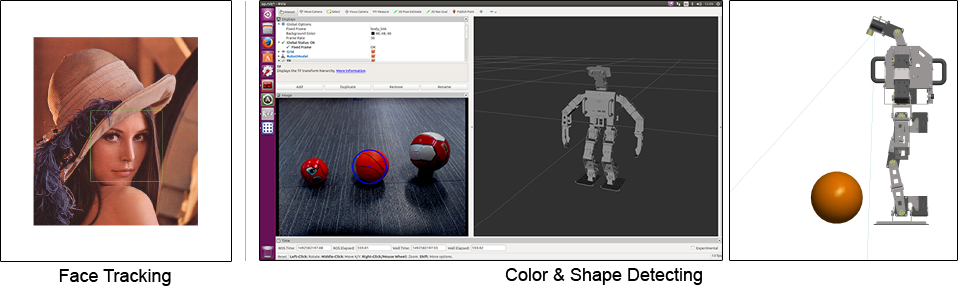
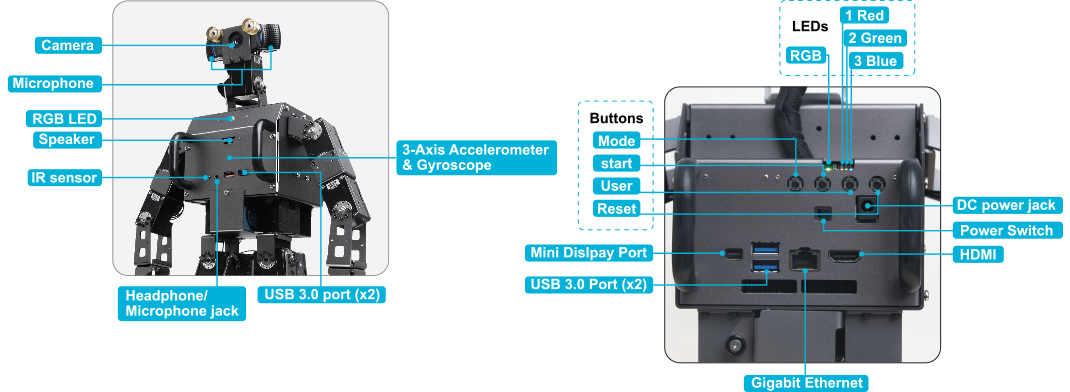
Powerful & Convenient Interfaces
High Performance and Advanced Features
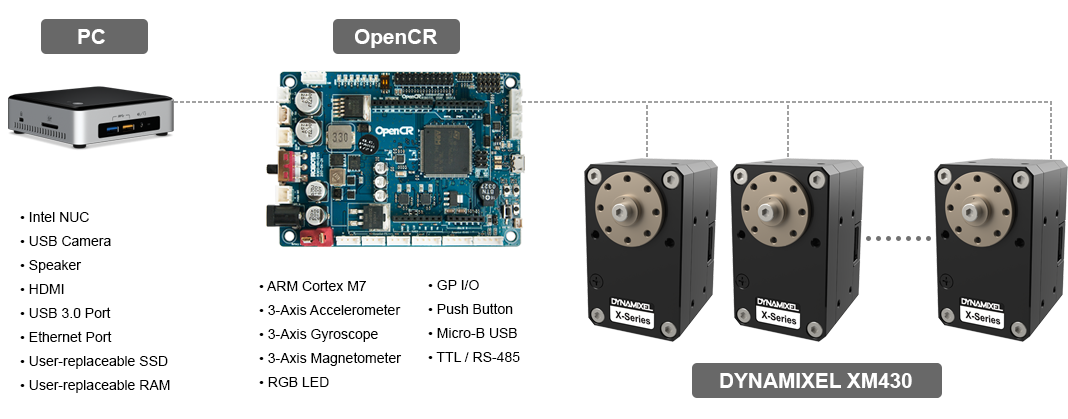
▪ Built-in PC : Intel NUC with an Intel Core i3 processor, RAM 8GB DDR4, 128GB M.2 SSD
▪ Management controller (OpenCR): ARM Cortex-M7
▪ 20 actuator modules (6 DOF leg x2+ 3 DOF arm x2 + 2 DOF neck)
▪ Actuators with durable metallic case & gears (DYNAMIXEL XM430)
▪ Self-maintenance kit (easy to follow steps and instructions)
▪ Standby mode for low power consumption
▪ 4.5Mbps high-speed Dynamixel bus for joint control
▪ 1800mAh LIPO Battery (30 minutes of operations), charger, and external power adapter
(Battery can be removed from robot without shutting down by plugging in external power before removal)
▪ Versatile functionality (can accept legacy, current, and future peripherals)
▪ 3-axis gyroscope, 3-axis accelerometer, 3-Axis magnetometer, button x4, microphone x2, speaker x1
Simple and Clean Architecture
Open Platform (Hardware and Software)
▪ Mechanics Information
(Dimensions, Kinematics, Dynamics, CAD data)
▪ Electronics Information
(Controllers, Sub B/Ds, Schematics, Part Information)
▪ Software Information
(Development Environment, Framework, Source Code)
▪ Management Information
(Detailed Assembly Diagrams, User Maintenance Guide)
▪ Community Resources
(User-developed Code, Various Application Examples)
Dimensions and Weight

Specification

Advantages of developing with OP3 compared to OP2
There are several changes in OP3 and advantages of the new OP3 are listed as follows:
▪ New Actuators (higher torque)
▪ Increase of SSD capacity
▪ Increase of RAM capacity
▪ Dramatic improvement in computational power
▪ Replacing Mini HDMI with HDMI
▪ User friendly sub-controller(CM-730 → OpenCR)
▪ Improved camera
