.
Basic Feature
▪ Improved Torque, Compact Size
▪ Enhanced Durability and Expandability
▪ Hollow Back Case Minimizes Cable Stress (3-way-routing)
▪ Direct Screw Assembly to the Case (without Nut Insert)
▪ Improved Heat Sink Featuring an Aluminum Case
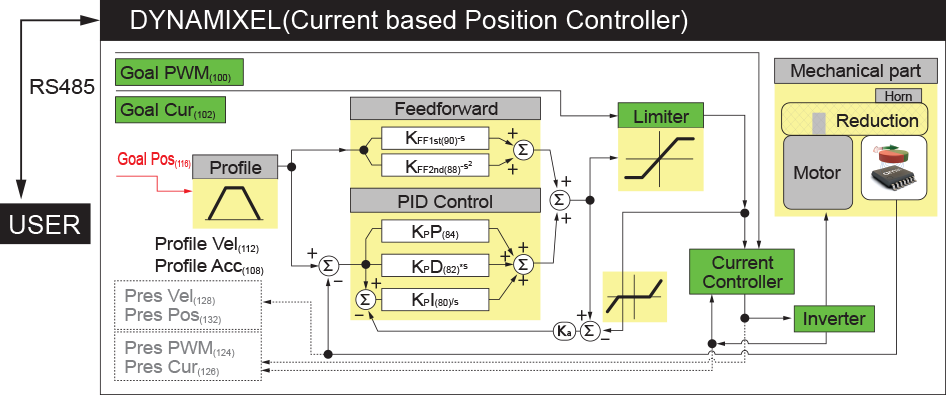
Various Control Functions
▪ 6 Operating Modes
▪ Current-Based Torque Control (4096 steps, 2.69mA/step)
▪ Profile Control for Smooth Motion Planning
▪ Trajectory Data and Moving Status (In-Position, Following Error, etc.)
▪ Energy Saving (Reduced Current from 100mA to 40mA)

Sophisticated Control Architecture
▪ Various feedback and control method according to developers’ needs
▪ Protocol 2.0 provides reliable packet communication
2-Axis DYNAMIXEL
▪ Control 2-Axis(2 DOF) with a single module
▪ Reduced weight and volume compared to using two modules
▪ Used for the robot's neck, shoulders, hips, wrists, and ankles

Weight, Volume Comparison
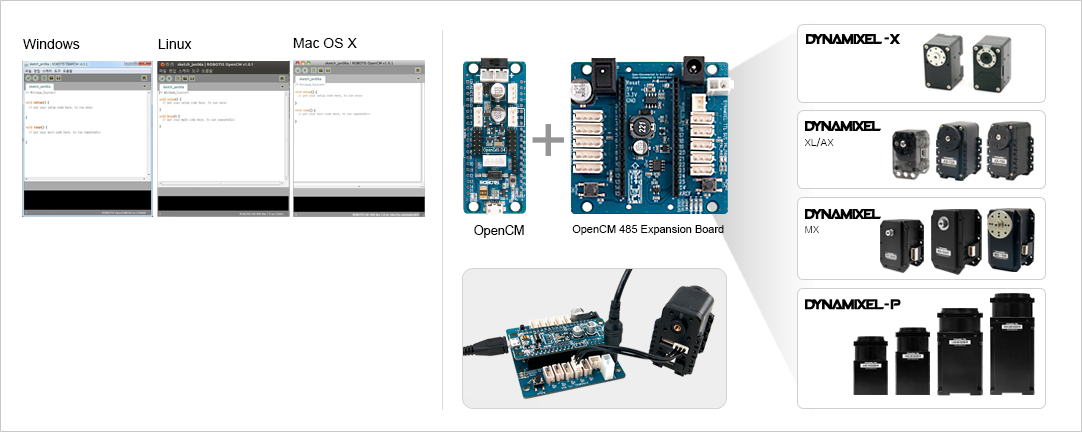
Compatible Device
▪ PC + USB2Dynamixel