.
RM-X52 Frame Set
Description
Features
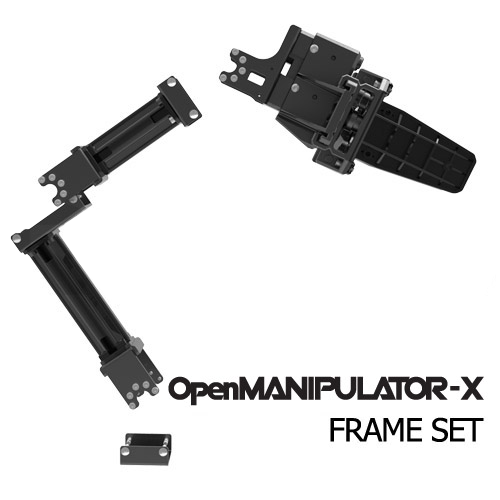
This product is a frame set which can make X430 based OpenMANIPULATOR-X.
You can assemble an OpenMANIPULATOR (4 DOF Arm + 1 DOF Gripper), which is the same as OpenMANIPULATOR-X (RM-X52-TNM).
DYNAMIXEL X430 is not included so you can select a suitable DYNAMIXEL model considering payload.
XH430, XM430 and XL430 are all compatible with this frame and can be also mixed.
You can make an OpenMANIPULATOR-X with your desired specification and can fix it on Base Plate-02 or attach it to TB3 Waffle Pi.
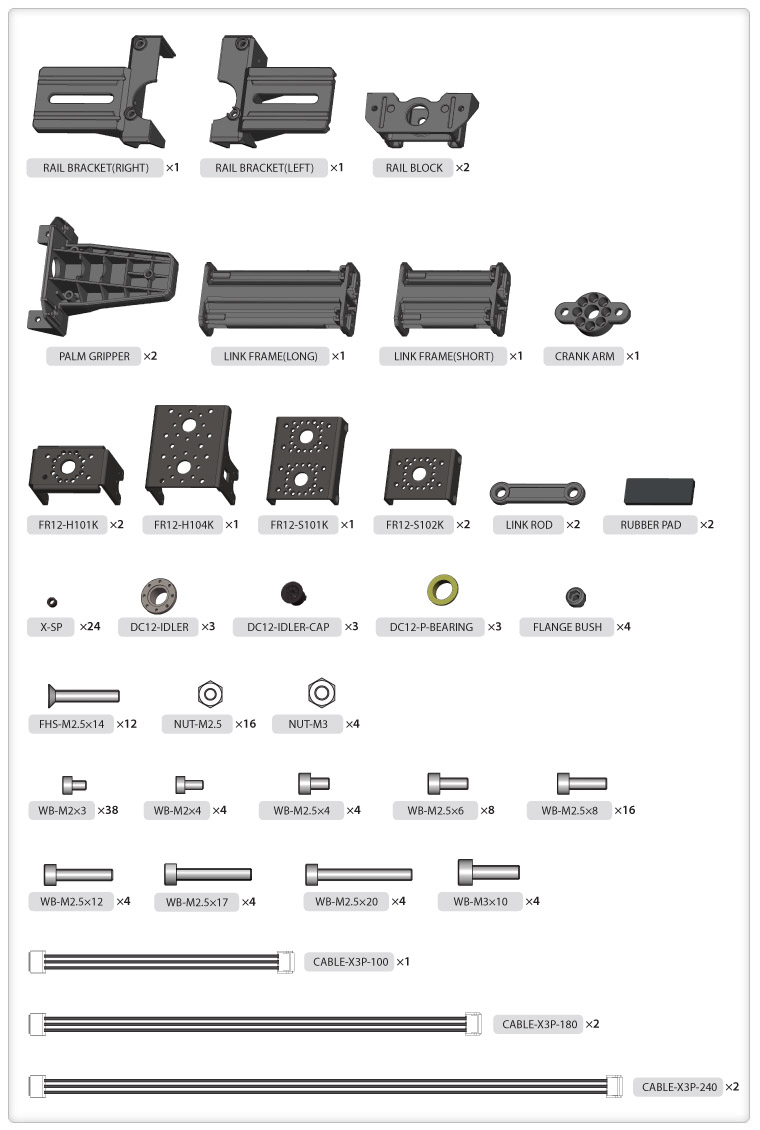
Package Components
| Exclusive Plastic Frame Set | 1 |
|---|---|
| FR12-H101K | 2 |
| FR12-H104K | 1 |
| FR12-S101K | 1 |
| FR12-S102K | 2 |
| HN12-I101 Set | 3 |
| Robot Cable Set X3P (by length) | 5 |
| Bolt & Nut Set | 1 |
| Rubber Pad (Finger Tip) | 2 types x 2 |
| Phillips Screwdriver | 1 |
| Allen Wrench (by type) | 3 |
Caution
DYNAMIXEL, power supply, and controller are not included.
Please purchase separately.
When selecting DYNAMIXEL X430 model, the appropriate model should be selected considering communication method and target specification (payload)
XL430 Single-model configuration is not recommended as it might be short of output.
When mixing XL430 with XH / XM430, they (XH / XM430) must be TTL communication models.
When you use XH430-V-series (24V model), you must configure your OpenMANIPULATOR as a single 24V model.
AX / MX series, X540 series, and PRO series cannot be used.
The assembly manual is not included, but you can download the PDF file online for free.
(Refer to below link)